
جلسه دفاع رساله دکترای (آقای داودی)
موضوع: مدلسازی، ساخت و کنترل کوادروتور با قابلیت مکاندهی به روتورها
ارائه دهنده: متین داودی دهکردی
استادان راهنما: دکتر محمد دانش
استادان مشاور: دکتر ایمان ایزدی
استادان داور: دکتر مهدی کشمیری ، دکتر سعید بهبهانی ، دکتر حمیدرضا کوفی گر
چیکده
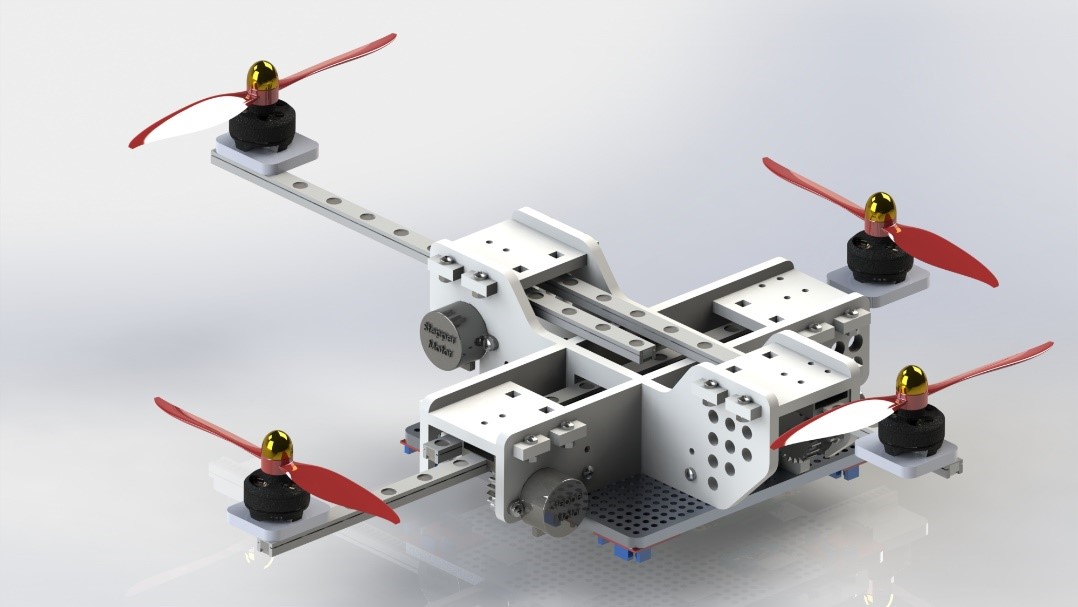
مولتی روتورها از جمله کوادروتورها را میتوان از پراستفاده و تجاریترین نوع از پرندههای هدایتپذیر از دور (پهپاد) در سالهای اخیر برشمرد. ساختار بهنسبت ساده، کنترل آسان وگستردگی ماموریتهای قابل تعریف و قیمت مناسب برای این نوع از پرندهها را میتوان از جمله عواملی برشمرد که سبب اقبال به آنها شده است. این نوع از پهپادها علیرغم مزایای برشمرده شده دارای معایب و محدودیتهایی هستند که از جمله آنها میتوان به مداومت پروازی پایین، پایداری ضعیفتر در مواجهه با باد و اغتشاش و همچنین تحملپذیری کمتر در برابر عیب اشاره نمود. بهمنظور کمرنگتر نمودن عیوب مورد اشاره در پژوهش حاضر، کوادروتوری با قابلیت مکاندهی به روتورها معرفی شدهاست که هر کدام از روتورها را میتوان در راستای محور بازوی آن روتور و بهصورت خطی مکاندهی نمود. این ویژگی باعث میشود بتوان تغییرات بیشتری را بر ورودیهای کنترلی نسبت به حالت معمول که فقط از تغییرات سرعت دورانی روتورها استفاده میشود اعمال نمود. در پژوهش حاضر و در ابتدا معادلات مدل دینامیکی کوادروتور با در نظر گرفتن متغیر بودن مکان روتورها و با استفاده از محاسبه مشتق مومنتومهای خطی و زاویهای استخراج شده است. در ادامه نیز دو نوع کنترلکنندهی مود لغزشی زمان محدود تطبیقی و فازی برای این پهپاد توسعه داده شده و در شرایط مختلف مورد بررسی و ارزیابی قرار گرفتهاست. در کنترلکننده تطبیقی مکاندهی به روتورها بهوسیله نگاشت و چهار مرحله فیلتر سیگنال اولیه صورت میگیرد. نگاشت پیشنهادی بر ورودیهای کنترلی غلتش و پیچش کنترلکننده اعمال شده و مکان اولیهای را برای هر روتور پیشنهاد میدهد. با اصلاح چهار مرحلهای این سیگنال مکان و سرعت هر روتور منطبق با محدودیتهای عملگرها محاسبه شده و تنظیم میگردند. در کنترلکننده دوم که بر اساس قانون فازی توسعه داده شدهاست مکاندهی به روتورها براساس رهیافت تخصیص کنترل و با روش بهینهسازی محدب با تشکیل تابع لاگ برییر انجام میگیرد. علاوه براین در این گام تحمل عیب نیز مورد توجه قرار گرفته و با بهرهگیری از روش فازی در صورت وجود عیب از قابلیت مکاندهی به روتورها استفادهشده و عیوبی که منجر به کاهش نیروی پیشرانش ملخ گردند به نحو مناسبی تحمل میشوند. در شبیهسازی انجام شده تاثیر مکاندهی بر مصرف انرژی و پایداری کوادروتور در برابر اغتشاشات نسبت به کوادروتورهای متداول در هر دو کنترلکننده پیشنهادی ارزیابیهای شده و تاثیر مثبت آن در این موارد نشان داده شدهاست. علاوه بر این، در شبیه سازی های انجام شده اثر مثبت مکاندهی به روتورها در استفاده از این قابلیت برای تحمل پذیری بالاتر هنگام رخداد عیب نشان داده شد. همچنین با ساخت نمونه آزمایشگاهی از کوادروتور با قابلیت مکاندهی به روتورها، آزمونهای عملی نیز انجامشده و در آنها نتایج شبیهسازیها در زمینه مصرف انرژی و پایداری هنگام حضور اغتشاش تایید شده است.
کلمات کلیدی: کوادروتور، مکاندهی به روتورها، کنترل تطبیقی، کنترل مود لغزشی، کنترل فازی، بهینهسازی محدب، تخصیص کنترل، تابع لاگ برییر، تحمل عیب
