
جلسه دفاع رساله دکترای (آقای عباسی)
موضوع: طراحی و توسعه ی یک پروتکل کنترلی توزیع شده برای تخصیص وظیفه ی مشترکِ حمل بار آویزان به یک سیستم چند کوادروتوری
ارائه دهنده: احسان عباسی نصرآبادی
استادان راهنما: دکتر مصطفی غیور، دکتر محمد دانش
استادان داور: دکتر مهدی کشمیری، دکتر سعید بهبهانی، دکتر آریا الستی
چکیده:
تمرکز اصلی این پژوهش بر روی طراحی و ارائه ی یک پروتکل کنترلی توزیع شده ی مناسب، کارا و بهینه برای حل مسائل اجماع و آرایش یک سامانه ی چند عاملی با دینامیک های غیرخطی می باشد. در عین حال، حل مسأله ای دیگر با نام تخصیص وظیفه ی مشترک به این سامانه ی چند عاملی یکی دیگر از مسائلی است که در این پژوهش روی آن تمرکز خواهد شد.
سامانه ی چند عاملی انتخاب شده برای این پژوهش یک سامانه ی چند کوادروتوری است که کوادروتورها در آن به عنوان عامل های غیرخطی شناخته می شوند. علاوه بر غیرخطی بودن دینامیک این عامل ها، کوپل بودن دینامیک کوادروتورها و همچنین کم عملگر بودن آنها چالش های دیگری است که به این پژوهش افزوده شده است. اجماع و کنترل آرایش از جمله مسأله هایی است که در ارتباط با این نوع سامانه های چند عاملی مورد بحث قرار می گیرند. در این پژوهش سعی بر آن شده است که هر دو مورد از این مسأله ها برای یک سامانه چند عاملی با عامل های غیرخطی و کم عملگر، یعنی همان کوادروتورها، طراحی و حل شود. با طراحی یک پروتکل کنترلی توزیع شده ی متفاوت، که ترکیبی از کنترل کننده های گام به عقب انتگرال گیر و کنترل کننده ی مد لغزشی است، مسأله های اجماع و کنترل آرایش این سامانه ی چند کوادروتوری حل خواهد شد تا با استفاده از اثبات پایداری و همچنین انجام مسأله ی شبیه سازی شده، صحت و عملکرد این پروتکل آزموده شود.
علاوه بر مسأله ی اجماع و کنترل آرایش برای یک سامانه چند عاملی، با عامل های غیرخطی و کم عملگر که همان کوادروتورها هستند، مسأله ی دیگر که تخصیص وظیفه ی مشترک به این سامانه است نیز مورد بحث و بررسی قرار گرفته می شود. این وظیفه ی مشترک تخصیصی، همان حمل و نقل هوایی بار آویزان به وسیله ی این سامانه ی چند کوادروتوری است. تا به حال تحقیقات زیادی در این زمینه ارائه شده است، اما در همه ی تحقیقات قبلی از فرض های زیادی برای ساده سازی مسأله استفاده شده است. ساده سازی دینامیک کوادروتورها، در نظر گرفتن فاصله ی ثابت بین کوادروتورها و بار به جای استفاده از دینامیک کابل، در نظر گرفتن کابل های اتصال به صورت چند فنر و میراگر به صورت سری بدون در نظر گرفتن جرم کابل ها و یا در نظر گرفتن نیرویی که از بار به کوادروتورها وارد می شود به عنوان اغتشاش خارجی از جمله این فرض ها است. علاوه بر این فرض ها، در تمامی تحقیقات قبلی پروتکل کنترلی برای کوادروتورها طراحی شده و به صورت غیر مستقیم بار آویزان از محلی به محل دیگر انتقال داده شده است، اما در این پژوهش با استفاده از طراحی الگوریتمی خاص، خطای ردیابی مسیر برای بار آویزان به صورت مستقیم به صفر همگرا می شود.
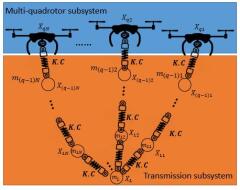
در این پژوهش علاوه بر اینکه از فرض های ساده سازی نقل شده، استفاده نشده، الگوریتم های کنترلی ارائه شده ی اصلی نیز بر مبنای خطای ردیابی بار آویزان طراحی شده است. کوادروتورها به وسیله ی کابل به بار متصل شده اند که دینامیک کابل به صورت چند جرم و فنر و میراگر در نظر گرفته شده است. با این کار هم جرم کابل ها مدنظر قرار میگیرد، یعنی دینامیک کابل ها نیز در دینامیک مسأله ادغام خواهد شد، و هم از انحنای کابل ها در اثر اغتشاشات خارجی وارد بر کابل ها صرف نظر نمی شود. با استفاده از دو روش طراحی شده ی خاص بر مبنای روش گام به عقب و کنترل سطح پویا، کنترل موقعیت و سرعت بار با چند مرحله گام به عقب به کنترل موقعیت و سرعت کوادروتورها مربوط و کوپل می شود. با این روش میتوان کنترل مستقیمی بر روی بار داشت.
