
جلسه دفاع پایان نامه کارشناسی ارشد (آقای محمدامین صفوی)
موضوع: کنترل توزیع شده سيستم چند عاملي کوادکوپترها به منظور دریافت بار در حال سقوط
ارائه دهنده: محمد امین صفوی
استادان راهنما: دکتر محمد دانش
استادان مشاور: دکتر حسن موسوی
استادان داور: دکتر مصطفی غیور ، دکتر مهدی کشمیری
چکیده:
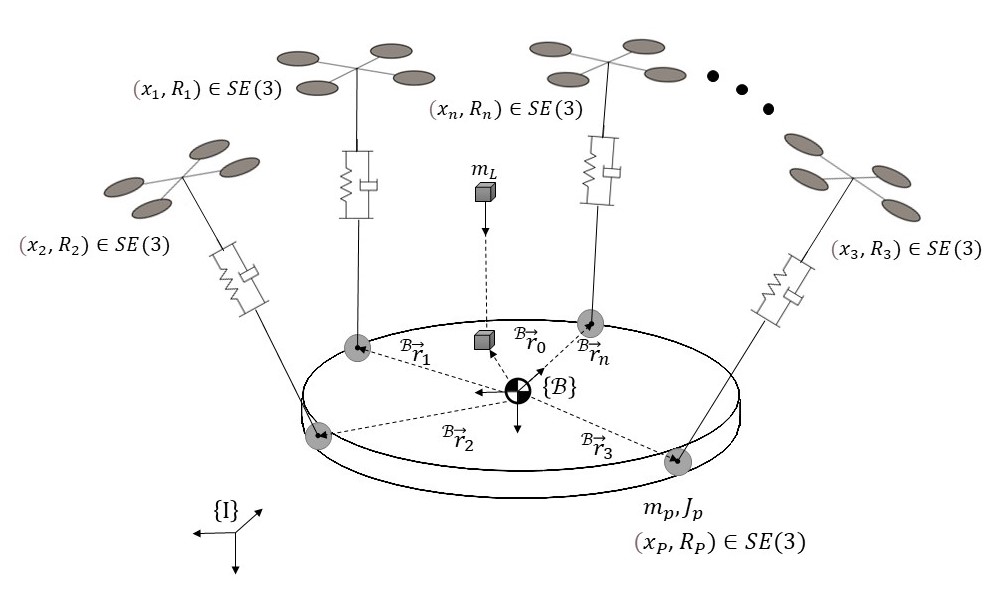
در سالهای اخیر مطالعات بر همکاری ربات ها و مهندسی رفتارهای گروهی هوشمند رشد چشمگیری داشته است. در همین راستا به مدلسازی و طراحی کنترلکننده توزیعی جهت همکاری مجموعه ای از کوادروتورها جهت حمل بار تحت ضربه ناشی از بار در حال سقوط پرداخته شده است . ابتدا به تشریح مفروضات و استخراج مدل دینامیکی عاملها و برهمکنش آن ها پرداخته شده، سپس مدلسازی ضربه به صورت برخورد صلب و برخورد غیرالستیک بررسی شده ؛ است. همچنین از مفاهیم مکانیک هندسی جهت توصیف جهتگیری عاملها استفاده شده ؛ سپس به توسعه و طراحی روش کنترلی پرداخته شده است. بهمنظور افزایش امنیت و یافتن راه حل های هوشمند جهت همکاری کوادروتورها، از روش بهینهسازی مسیر توزیعی و استفاده از بهینهساز ترکیبی iLQR و الگرانژ افزونه به نام ALTRO استفاده شده است. جهت اعمال قیود بهینهسازی، از روش الگرانژ افزونه استفاده شده، به گونه ای که روش iLQR وظیفه کمینهسازی مسئله الگرانژ افرونه را دارد. سپس مسئله طراحی مسیر عاملها در قالب یک مسئله بهینهسازی واحد تعریف میشود. با توجه به نحوه مدلسازی عاملها و ساختار مسئله بهینهسازی، الگوریتمی جهت موازی سازی و شکستن مسئله پیشنهاد شده است که موجب مقیاس پذیری راه حل کنترلی میشود و به عبارت دیگر، این الگوریتم کنترلکننده توزیعی کل سامانه است. به عبارت دیگر، الگوریتم کنترلی و مدل استفاده شده جهت طراحی کنترلکننده یک سامانه سه عاملی با هفت عامل یکسان بوده و اضافه یا کم کردن عاملها موجب تغییر مدل ویا کنترلکننده نمیشود. از نظر حجم پردازش نیز، به علت موازی سازی محاسباتی، افزایش تعداد عاملها موجب افزایش زمان چشمگیر محاسبات بهینهسازی نمیشود. در نهایت عملکرد الگوریتم پیشنهاد شده در سناریوهای مختلف حالت شناور، حالت انتقال بار، و حالت دریافت بار در حال سقوط بررسی شده است.
