
جلسه دفاع پایان نامه کارشناسی ارشد (آقای سپهر آذران)
موضوع: طراحی کنترل کننده توزیع شده برای یک سامانه چند عاملی کوادکوپترهای حامل صفحه صلب آویزان برای کنترل ضربه ناشی از سقوط بار بر روی صفحه
ارائه دهنده: سپهر آذران
استادان راهنما: دکتر محمد دانش
استادان داور: دکتر مرضیه کمالی و دکتر ایمان ایزدی
چکیده:
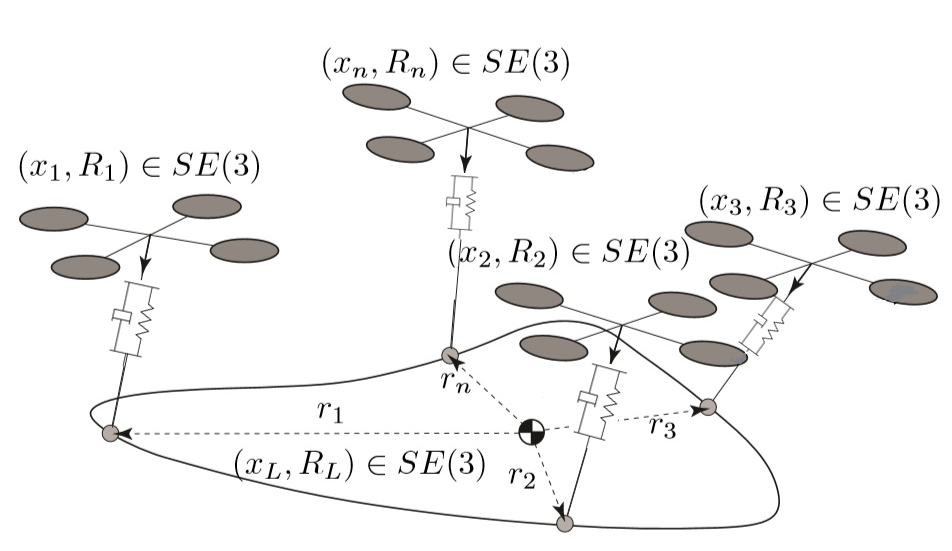
با توجه به کاربردهای گسترده کوادکوپترها، استفاده از این پرندههای بیسرنشین در سالهای اخیر افزایش یافته و پژوهشهای متعددی در این زمینه صورت گرفته است. یکی از شاخههای پژوهشی مرتبط با کوادکوپترها، بررسی همکاری بین این دستگاهها در قالب یک سیستم چندعاملی است. این پژوهش نیز به طراحی و کنترل سامانهای متشکل از چند کوادکوپتر و یک صفحه صلب بار میپردازد که توسط کابلهایی به مرکز جرم کوادکوپترها متصل شده است. هدف اصلی این سامانه، کنترل نیروی ناشی از ضربه جسم صلبی است که به سطح صفحه بار برخورد میکند. ابتدا مدلسازی سینماتیکی و دینامیکی سامانه انجام شده است. سامانه به دو بخش اصلی تقسیم میشود: عاملهای حامل شامل کابل و کوادکوپترها و عامل بار که تنها شامل صفحه بار است. این تفکیک، انعطافپذیری و مقیاسپذیری سامانه را افزایش میدهد و به این ترتیب میتوان بدون افزایش پیچیدگیهای دینامیکی و سینماتیکی، تعداد عاملهای حامل را کم یا زیاد کرد. برای مدلسازی عامل حامل، از روش نیوتون-اویلر استفاده شده است که در تحلیل دینامیکی سیستمهای چندجسمی کاربرد دارد. در این مدلسازی، رفتار دینامیکی کابل و کوادکوپترها به صورت یکپارچه بررسی شده است. برای مدلسازی ضربه وارد بر صفحه بار، از روش ناهموار استفاده شده است که توانایی مدلسازی رویدادهای ناگهانی مانند ضربه را افزایش میدهد. همچنین، قانون پایستاری مومنتوم برای محاسبه نیروی ناشی از ضربه به کار گرفته شده است. نیروی حاصل از ضربه، سهبعدی بوده و در سه جهت مختلف بر عامل بار و در نتیجه بر کوادکوپترها اعمال شده است. مقدار این نیرو به عواملی از جمله سرعت جسم در حال سقوط، سرعت بار در لحظه برخورد، جرم هر دو جسم و ضریب بازگشت ضربه وابسته است. در این پژوهش، ضربه به صورت کاملاً غیرالاستیک در نظر گرفته شده است. همچنین، محل برخورد ضربه در دو حالت مرکزی و غیرمرکزی نسبت به مرکز جرم عامل بار مدلسازی شده است. این مدلسازی با هدف شبیهسازی دقیقتر ضربه جسم صلب سهبعدی به صفحه بار انجام شده است. در بخش بعدی پژوهش، کنترلکنندههایی بر اساس روش کنترل LQR طراحی شدهاند. برای استفاده از این کنترلکنندهها، معادلات حرکت سامانه با روش خطیسازی به کمک بازخورد خطیسازی شدهاند. یک کنترلکننده LQR استاندارد برای هر یک از عاملهای حامل و یک کنترلکننده LQR با عمل انتگرالگیر برای عامل بار به صورت جداگانه طراحی شده است. وظیفه کنترلکننده دوم، یافتن نیروها و گشتاورهای مورد نیاز در مرکز جرم عامل بار است تا بتواند بار را به مختصات مرجع برساند. پس از محاسبه نیروها و گشتاورهای مورد نیاز در مرکز جرم عامل بار، یک مسئله بهینهسازی برای تعیین نیروی مورد نیاز در هر کابل متصل به بار حل شده است. نتایج این مسئله به کوادکوپترها ارسال میشود تا نیرو و مختصات مورد نیاز را تولید کنند. این توزیع وظایف کنترلی، کنترل توزیعشده را در سامانه ممکن میسازد. در نهایت، شبیهسازی سامانه برای شرایط مختلف انجام شده است تا عملکرد کنترلکنندههای طراحیشده در شرایط مختلف رویداد ضربه و دنبال کردن مسیر توسط عامل بار بررسی شود. برای حل معادلات دیفرانسیلی حاکم بر سامانه از حلگر ode45 استفاده شده و تمامی شبیهسازیها در محیط متلب انجام شدهاند. نتایج شبیهسازیها نشاندهنده توانایی بالای کنترلکنندههای طراحیشده در مدیریت نیروهای ناشی از ضربه و حفظ پایداری سامانه است.
