
جلسه دفاع پایان نامه کارشناسی ارشد (آقای علی ابوالحسنی)
موضوع: شناسایی برخط مدل تعامل تیغه جراحی با بافت نرم به کمک بازخورد نیرو و تصویر در روشهای مداخلهای به کمک ربات
ارائه دهنده: علی ابوالحسنی تفتی
استادان راهنما: دکتر مهدی کشمیری-دکتر عباس کرمی
استادان داور: دکتر سعید بهبهانی-دکتر محمد دانش
چکیده:
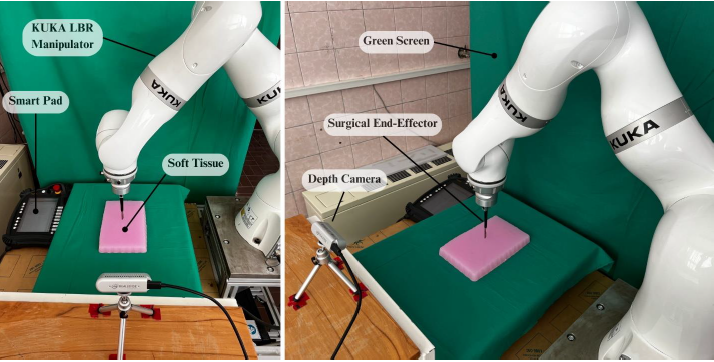
برش بافت به عنوان یکی از مهارتهای اساسی در جراحی، به طور مستقیم بر نتیجه جراحی و بهبودی پس از عمل بیماران تأثیر میگذارد. برش خودکار با کمک ربات، میتواند خستگی را در مراحل طولانی کم اثر نماید، عملیات پرتکرار را با دقت بالا کامل کند و کارایی کلی جراحی را بهبود بخشد. البته این مهم، در مسائل مربوط به دورا-پزشکی و جراحیهای از راه دور، اهمیت دوچندان پیدا میکند. در جراحی واقعی، بافتهایی که قرار است برش داده شوند را میتوان به دو گروه تقسیم کرد: نرم و الاستیک (مانند پوست، تاندونها، رباطها، سلول و غیره) یا سخت و شکننده (مانند لامینا، جمجمه، طاعون کلسیفیه و غیره). در این پژوهش، ما بر روی مورد اول یعنی برش بافت نرم تمرکز داریم. اگرچه تحقیقاتی در زمینه برش اجسام صلب انجام شده است اما مطالعات در حوزه برش انعطافپذیر به دلیل پیچیدگی زیاد در مراحل مقدماتی است. مطالعات در حوزه برش خودکار بافت های نرم، محدود و بیشتر کاربردهای آن در زمینه فرآوری مواد غذایی است که نیازی به کنترل دقیق ندارد. لازم به ذکر است، مدل مکانیکی برش و شناسایی پارامترهای آن در تعامل با بافت نرم با تلفیق دادههای نیرو و تصویر پیشتر انجام نگرفته است. در این پژوهش، به منظور ارائه مدلی جامع برای شناسایی و تحلیل تعامل تیغه جراحی با بافت نرم، یک الگوریتم ترکیبی جدید مبتنی بر نیرو و بینایی، طراحی و اجرا گردیده است. ابتدا پس از بررسی تحقیقات پیشین، مدل مکانیکی برش بافت نرم در مراحل مختلف تعامل با تیغه جراحی پیشنهاد شده است. سپس به کمک تکنیکهای پردازش تصویر، فاز تعامل (پیش از برش و حین برش)، شناسایی و تخمین عمق برش و مساحت تیغه درگیر با بافت، انجام گرفته است. در نهایت پارامترهای مدلهای مکانیکی پیشنهادی در دو فاز، با استفاده از الگوریتمهای هوشمند شبکه عصبی، شناسایی و گزارش گردیده است. روش پیشنهادی طی آزمایشهای متعدد با استفاده از بازوی 7 درجه آزادی KUKA LBR پیادهسازی و ارزیابی شده است.
