
جلسه دفاع پایان نامه کارشناسی ارشد (خانم مائده موحدی)
موضوع: کنترل تطبیقی سیستم کایت انرژی برای طی مسیر سیکل بهینه جهت استحصال حداکثر انرژی
ارائه دهنده: مائده واحدی
استادان راهنما: دکتر سعید بهبهانی – دکتر مهدی کشمیری
استادان داور: دکتر سعید ضیایی راد – دکتر مجدالدین نجفی
چکیده:
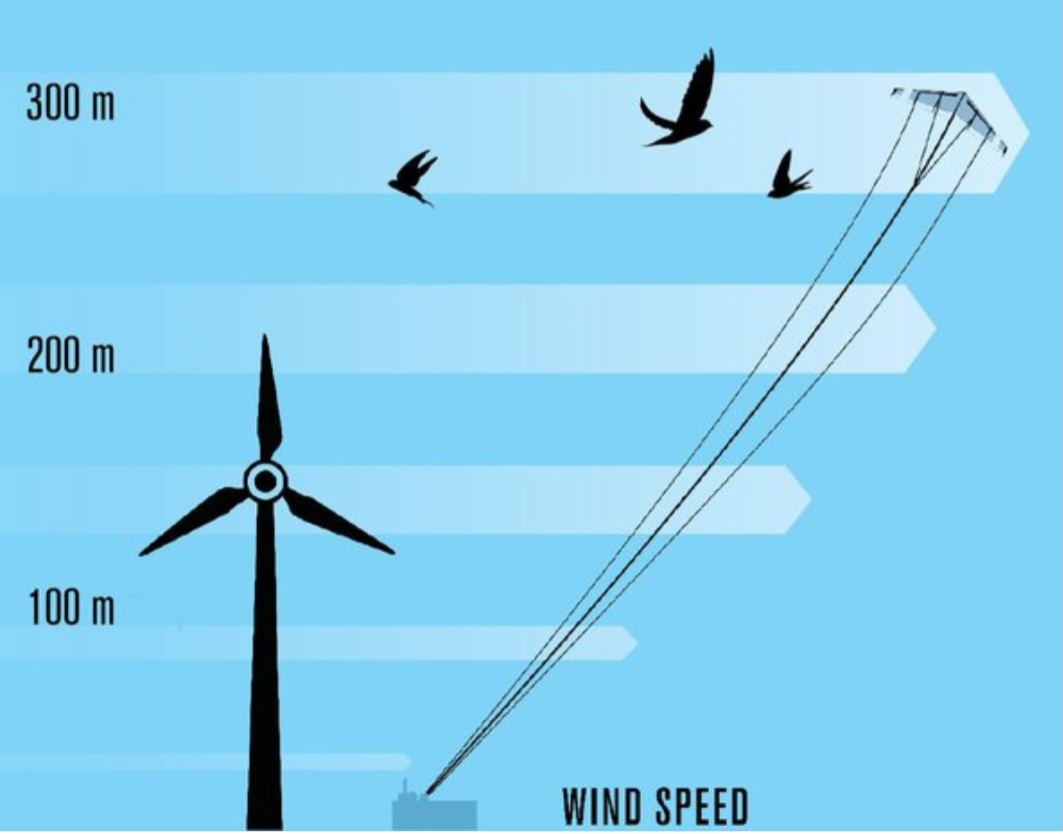
در سالهای اخیر، مسائل اقتصادی، زیستمحیطی و بسیاری از عوامل دیگر نگاه جامعه بشری را به سمت استحصال انرژی از باد هوابرد جلب کرده است. از آنجا که باد در ارتفاعات بالا دارای ثبات و قدرت بیشتری است، لذا با بهرهمندی از آن میتوان به توان تولیدی بیشتر دست یافت. یکی از روشهای پیشنهادی در این زمینه استفاده از کایت انرژی میباشد. کایت در حالت صلب که در این پروژه در نظر گرفته شده شبیه به یک هواپیمای بدون سرنشین است و همینطور میتواند غیر صلب و مشابه یک بادبادک باشد که همواره در ارتفاع عملیاتی بسیار بیشتر از توربینهای بادی قرار گرفته و از آنجا که همچون توربینهای بادی به زیرساختهای عظیم و هزینههای نگهداری هنگفت نیاز نخواهد داشت، میزان هزینههای مصرفی به توان تولیدی در این روش بارها کمتر از روشهای تجدیدپذیر دیگر خواهد بود. در فناوری نامبرده کایت بهوسیله یک طناب مهار شده و در اثر نیروی باد و گشتاورهای اعمالی از طرف آن به پرواز در میآید. با اعمال نیروی برآ از طرف باد، کایت یک مسیر 8-لاتین خوابیده را طی میکند که باعث کشش در طناب و حرکت ژنراتور مستقر بر زمین گردیده و در نتیجه آن، انرژی الکتریکی تولید میشود. . در این پژوهش ، ابتدا معادلات حرکت کایت مدلسازی شده و سپس برای اولین بار، تحلیل سهبعدی دینامیکی یک کایت مقید به کابل با در نظر گرفتن شتاب و کنترل کامل کایت، گسترش یافته و روابط آن استخراج گردیده است. از یک ساختار کنترل دو حلقهای برای کنترل سیستم استفاده میشود؛ که حلقه بیرونی مبتنی بر فیدبک خطی ساز و برای کنترل حرکت انتقالی کایت است؛ در حالی که حلقه داخلی برای کنترل زوایای اویلر کایت و مبتنی بر کنترل مود لغزشی است. خروجی حلقه کنترلی بیرونی زوایای اویلر مطلوب و کشش کابل، و خروجی حلقه کنترلی داخلی زوایای سطوح کنترلی کایت است. برای نخستین بار الگوریتم هدایتی گسترش داده شده است که در اکثر نقاط سیکل حرکت پیشنهادی کشش کابل مثبت و استحصال انرژی بیشینه باشد؛ و همچنین در نهایت و بعد از طی تعداد سیکل مشخص، کایت با طی یک مسیر برگشت دقیقاً به شرایط ابتدایی برگردد. با توجه به کمعملگر بودن سیستم، برای اولین بار الگوریتمی ارائه شده که کشش کابل، زوایای اویلر و در نتیجه آن زاویه حمله، زاویه سرش جانبی، و ماتریس انتقال نیروهای آیرودینامیک از دستگاه باد به دستگاه اینرسی به گونهای محاسبه گردد که در نهایت برآیند نیروهای کشش، وزن، و آیرودینامیک وارد بر کایت با نیروی مطالبه شده توسط کنترلر برابر شود. ضرایب نیروها و گشتاورهای آیرودینامیکی با استفاده از نرمافزار "xflr5" و با توجه به زوایه بالکها استخراج شدهاند
