
جلسه دفاع پایان نامه کارشناسی ارشد (خانم نیلوفر جوشن زاده)
موضوع: طراحي سيستم کنترلي، تخمين موقعيت چرخشي و رهگيری مسير سوارشده بر ریزپهپاد بالزن
ارائه دهنده: نیلوفر جوشنزاده
استادان راهنما: دکتر حمید رضا میردامادی
استادان مشاور: -
استادان داور: دکتر سعید ضیائیراد- دکتر مرضیه مجدراصیل
چیکده:
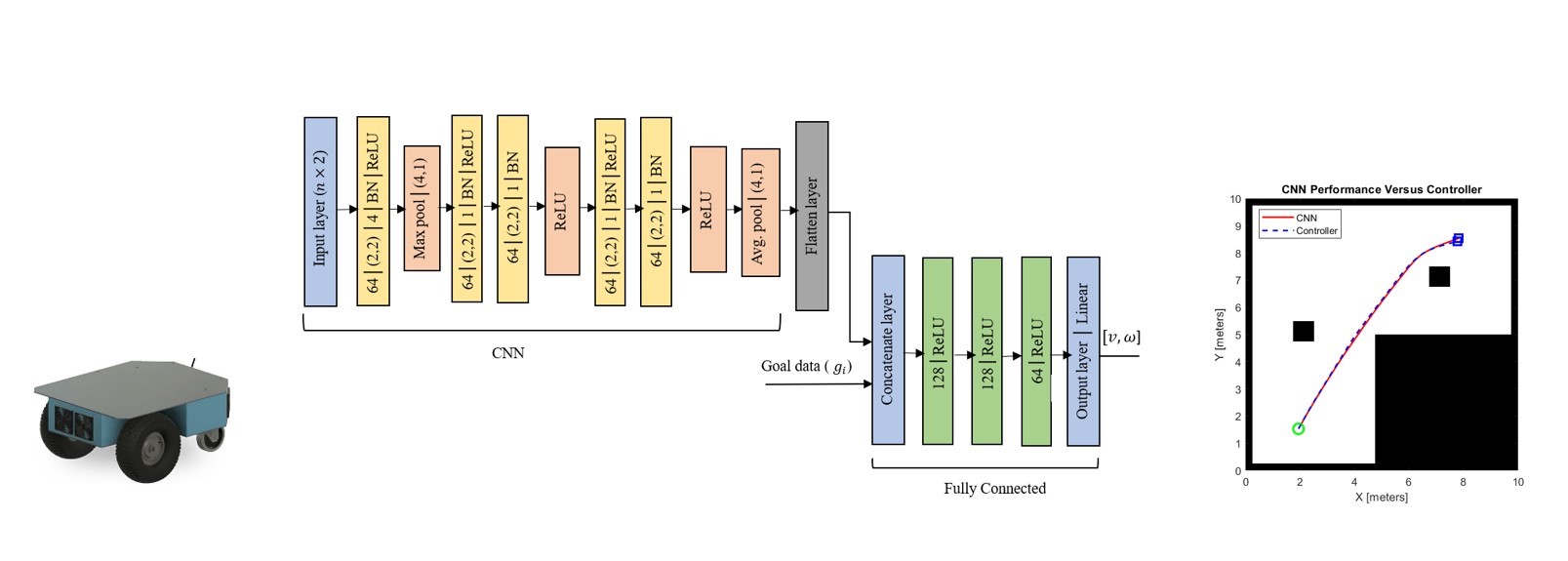
امروزه با پیشرفت هوش مصنوعی و روشهای مبتنی بر داده، علاوهبر روشهای مرسوم برنامهریزی مسیر حرکت ربات، که بر پایهی روشهای محاسباتی هستند، روشهای برنامهریزی حرکت مبتنی بر داده و یادگیری ماشین نیز بهکار گرفته میشوند. در صنایع مختلف حل چالش مسیریابی و برنامهریزی حرکت رباتهای سیار دو چرخ، برای حرکت بر روی یک مسیر ایمن بدون برخورد با موانع محیط، بهطوریکه ربات با پیمایش مسیر انتخاب شده در نهایت به نقطهی هدف برسد، از اهمیت ویژهای برخوردار است. در این پایاننامه، مدل آموزش دیدهای بهکار گرفته میشود که از مجموعهی دادههای جمعآوری شده برای پیشبینی مسیر مطلوب استفاده میکند. برای مدل یاد شده، یک مدل شبکهی عصبی کانولوشن پیشنهاد میشود که توانایی یادگیری نگاشت پیچیدهی دادههای حسگر و بردار اطلاعات نقطهی هدف (نقطهی پایان مسیر)، به کمیتهای سینماتیکی مطلوب را دارد. شبکهی کانولوشن در یک الگوریتم کنترلی ترکیبی بهکار گرفته میشود، که شامل روشهای کنترل کلاسیک و کنترل هوشمند است. پس از تولید کمیتهای سینماتیکی مطلوب به کمک بخش پیشخور هوشمند (شبکهی عصبی کانولوشن)، از یک کنترلکنندهی پسخور زمان-گسستهی کلاسیک برای همگرایی گامهای محاسباتی به کمیتهای مطلوب (مرجع) استفاده میشود. روش حل مساله با روش پیشنهادی در این پژوهش دارای هفت گام اصلی میباشد. در گام یکم از مجموعهای از الگوریتمها، برای جمعآوری داده بهمنظور آموزش مدل شبکهی کانولوشن بر پایهی یادگیری راهنمایی شده استفاده میشود. ابتدا با تولید نقشهی محیط و الگوریتم طراحی مسیر پی.آر.ام، مسیر حرکت خواسته شده بدون در نظر گرفتن عامل زمان طراحی میشود. سپس بهوسیلهی معادلههای سینماتیکی ربات و کنترلکنندهی پیگرد محض که یک کنترلکنندهی ردیابی مسیر هندسی میباشد، حرکت یک ربات دو چرخ برای پیمایش مسیر طراحی شده شبیهسازی میشود. در طول رهگیری مسیر توسط ربات، دادههای حسگر فاصلهسنج و بردار اطلاعات هدف (نقطهی پایان مسیر)، به عنوان ورودی (ویژگی)های دادههای آموزشی، و بردار سرعتخطی مرکز جرم و سرعت چرخشی به عنوان خروجی (برچسب) دادههای آموزشی شبکه ذخیره میشوند. در گام دوم، با انتخاب تجربی ساختار شبکهی عصبی کانولوشن، مدل طراحی شده بهکمک مجموعهی دادههای جمعآوری شده در گام یکم، آموزش داده میشود. در گام سوم، پس از آموزش مدل شبکه و یافتن وزنها و پارامترهای بهینه، عملکرد مدل با استفاده از مجموعهی دادههای آزمون، ارزیابی میشود. در گامهای چهارم و پنجم، فرآیند پسپردازش بر روی پیشبینی شبکه انجام میشود که دربرگیرندهی تبدیل کمیتهای سینماتیکی سرعت به کمیتهای سینماتیکی موقعیت و درونیابی آنها، برای محاسبهی مجموعهی کمیتهای سینماتیکی مطلوب برای ورودی گام ششم است. در گام ششم، بخش پیشخور هوشمند انجام میشود، که با استفاده از خروجی گام قبل و دینامیک وارون، نیروهای لازم برای رسیدن به کمیتهای سینماتیکی مطلوب را تولید میکند. در گام پایانی این الگوریتم، نخست به کمک روش خطیسازی پسخور، توصیف فضای حالت سیستم خطیسازی میشود و سپس به کمک کنترل پسخور تناسبی، خطای موقعیت ربات کاهش مییابد. پس از همگرایی در حلقهی درونی پسخور، به کمک یک حلقهی بیرونی، برای گام زمانی بعدی به نقطهی آغاز تکرار الگوریتم باز میگردد، بهطوریکه در نهایت، مسیر پیشبینی شده توسط شبکه بهوسیلهی ربات دنبال شود. نتایج حاصل از این پایاننامه نشان میدهد که الگوریتم کنترلی ترکیبی شامل مدل شبکهی آموزش دیده، دینامیک وارون، و کنترل پسخور، میتواند ربات را برای رسیدن به نقطهی پایان از میان موانع، هم در محیط آموزشی و هم در محیطهای تغییر یافته هدایت کند. بهطورکلی در پایاننامهی حاضر، مجموعهی دادهها بهکمک شبیهسازی برای آموزش مدل شبکهی کانولوشن جمعآوری میشود و پس از آموزش مدل شبکه، الگوریتم ترکیبی از شبکهی کانولوشن، دینامیک وارون، و کنترل پسخور با هدف مسیریابی و دستیابی ربات به نقطهی پایان در محیط با حضور موانع، بهکار گرفته خواهد شد.
کلید واژگان: ربات چرخدار، رهگیری مسیر، شبکهی عصبی کانولوشن، طراحی مسیر پی.آر.ام، روش بهینهیابی آدام، خطیسازی پسخور، کنترل پیشخور، فضای حالت، دینامیک وارون، کنترل تناسبی.
