
جلسه دفاع پیشنهادیه رساله دکتری (آقای سیدمصطفی حسینی)
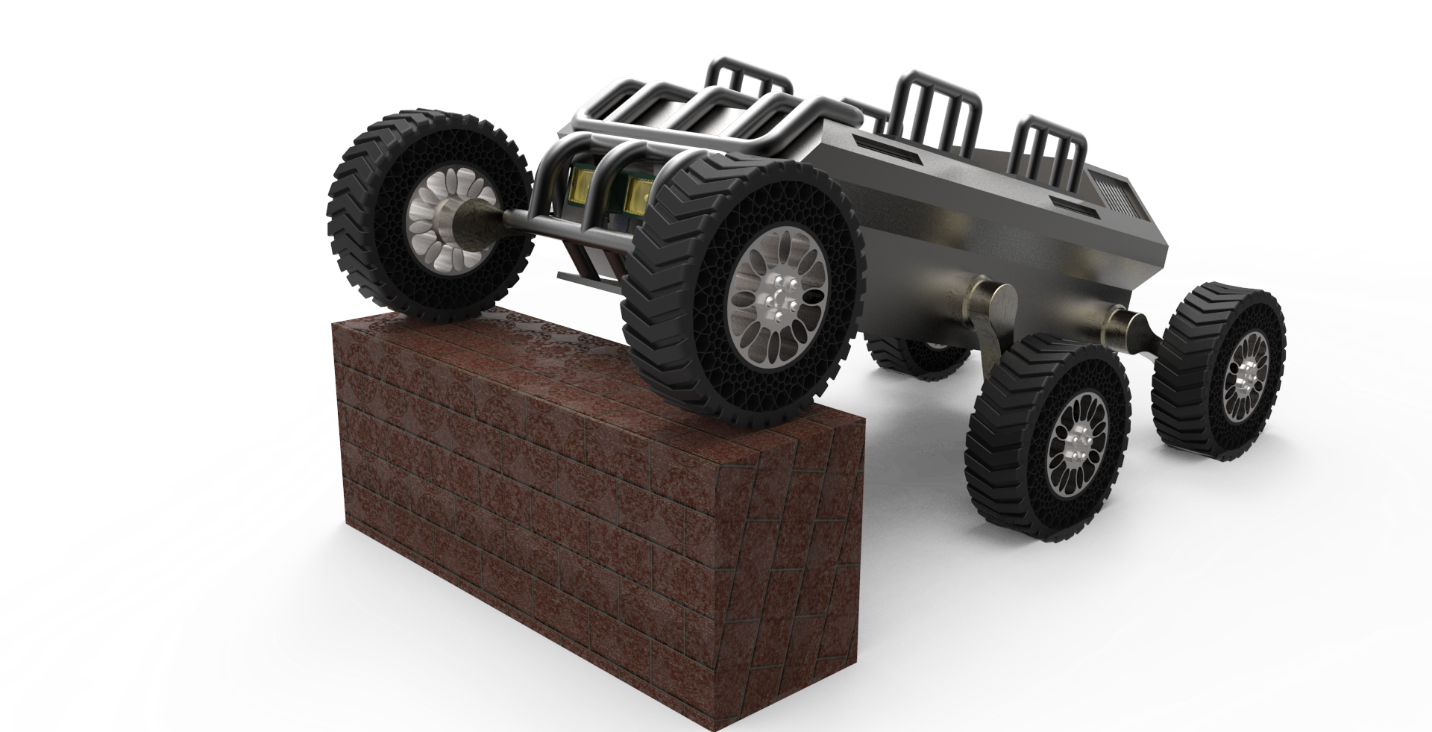
موضوع: عبور پایدار یک ربات شش چرخ-پا با پیکرهبندی تطبیقپذیر از سطوح ناهموار و موانع چالشبرانگیز
ارائه دهنده: سیدمصطفی حسینی
استادان راهنما: دکتر سعید بهبهانی
استادان مشاور: دکتر مهدی کشمیری
استادان داور: دکتر مصطفی غیور- دکتر محمد دانش
چکیده:
گسترهی استفاده از رباتها برای کمک به انسانها در زمینه های مختلف، بسیار وسیع می باشد. از میان آن ها، رباتهای چرخ دار- راه رونده توانایی بسیار خوبی در عبور از زمینهای ناشناخته و موانع نشان داده اند، بهطوری که میتوان گفت مزایای بارز هر دو مکانیزم حرکتی چرخدار و گام بردار را به ارث برده اند. ربات مورد بررسی در این پژوهش، یک ربات شش چرخ- پا با پیکرهبندی تطبیق پذیر میباشد که از جمله رباتهای چرخ دار- راه رونده به حساب میآید. با توجه به درجات آزادی بالا در کنار مانورپذیری زیاد، پیچیدگی در مدلسازی، کنترل و هدایت از مسائل پیشرو میباشند. در عبور از سطوح ناشناخته و ناهموار، مفصل دار بودن چرخ ها یک سیستم تعلیق فعال را رقم می زند. در عبور از موانع چالش برانگیزی که می توانند از شعاع چرخ هم بزرگتر باشند، رویکرد هوشمندانه این است که ربات بتواند با تغییر و تطبیق پیکره بندی و وضعیت خود، قابلیت عبور از موانع را بیابد. برای کنترل کردن وضعیت ربات و مسیریابی آن، مدل سازی دینامیکی کل سیستم، و مخصوصا مدل سازی درست تایر اهمیت زیادی خواهد داشت. تمامی نیروهای کنترل کننده و نیروهای مزاحم، در سطح تماس تایر با زمین ایجاد میشوند. طراحی یک کنترل کنندهی چند قسمتی برای تخمین لغزش، تخمین نیروهای وارده در سطح تایر، در ضمن مسیریابی و حفظ پایداری ربات در مسیرهای ناهموار، از اهداف این پژوهش می باشد. با توجه به افزونگی ربات و پیچیدگی بسیار زیاد معادلات قید بین ربات و سطح مانع در وضعیت های مختلفی که ربات در هر لحظه می تواند داشته باشد، طراحی مسیر در فضای مفاصل برای عبور از موانع، نیازمند حل معادلات پیچیده و بهینه سازیهای متعدد در بین جواب های ممکن است. لذا استفاده از الگورتیمهای هوش مصنوعی و یادگیری ماشین در این مسئله، راهکاری منطقی و نوآورانه خواهد بود. برای این منظور، ابتدا لازم است قابلیت مدلسازی کامل مساله با لحاظ وضعیت های تماس متنوعی که ممکن است بین ربات و مانع اتفاق بیافتد، ایجاد شود. برای رفع این نیاز، در صورت امکان از نرم افزارهای مدل سازی دینامیکی مانند ادمز استفاده خواهد شد، و با ایجاد یک حلقه، به کمک نرم افزارهایی مثل متلب، آموزش الگوریتم انجام خواهد شد.
